
AIoT Intelligence for Automotive Electronics Manufacturing
AIoT for Automotive Electronics Manufacturing | Voltentra AI.
Voltentra AI delivers AIoT, RFID, BLE, and edge intelligence for automotive electronics manufacturing, PCB tracking, ECU inventory, and SMT operations.
AIoT Coordination for ADAS Testing, AV Fleet Validation, and Sensor Calibration Operations
Autonomous vehicle engineering environments depend on continuous
synchronization between autonomous driving software stacks, proving-ground operations, ADAS
validation workflows, telematics infrastructure, engineering teams, calibration equipment, mobile
sensor platforms, and restricted test environments. Modern AV development facilities operate under
high telemetry density, distributed edge computing requirements, dynamic geofencing conditions, and
tightly controlled safety governance procedures. Operational visibility therefore requires more than
isolated tracking systems or conventional telemetry dashboards.
AVehicle AI provides
AIoT-enabled operational intelligence designed specifically for autonomous mobility validation
ecosystems across the Automotive sector. The platform supports AI-assisted personnel visibility,
adaptive access governance, RFID-based engineering asset coordination, BLE-enabled indoor
positioning, GPS fleet telemetry, edge AI orchestration, inventory intelligence, and validation
workflow monitoring across proving grounds, autonomous driving laboratories, urban simulation
corridors, autonomous shuttle programs, and ADAS testing facilities.
The operational
architecture supports autonomous vehicle development workflows involving LiDAR validation, radar
synchronization, perception stack calibration, drive-by-wire testing, HD mapping operations, GNSS
correction infrastructure, OTA software release validation, environmental simulation chambers,
autonomous fleet staging, battery validation, and sensor fusion testing.
AI reasoning
continuously evaluates workforce movement, mobile instrumentation behavior, telemetry anomalies,
validation bottlenecks, operational dependencies, and infrastructure coordination across distributed
autonomous mobility operations. RFID, BLE, GPS, LoRaWAN, UWB, industrial cellular, and edge
telemetry technologies support real-time operational awareness under indoor garages, RF-challenged
validation environments, outdoor proving grounds, and mixed urban roadway testing
conditions.
AVehicle AI was developed within Aperture Venture Studio with support from GAO’s
extensive industrial IoT deployment experience. The operational methodologies reflect decades of
experience supporting thousands of IoT deployments across advanced engineering operations,
enterprise mobility environments, R&D organizations, and mission-critical industrial infrastructure
programs.
This AVehicle AI has been in development for a certain time and has been
operating in stealth mode. It is expected to emerge from stealth and launch publicly before the
end of August 2026.
AI-Driven Workforce Visibility, Fleet Intelligence, and Validation Analytics
Intelligent Workforce Visibility & Contextual AI Reasoning
Autonomous vehicle proving grounds and ADAS validation programs involve rapidly changing operational conditions where engineering personnel, safety drivers, calibration specialists, fleet operators, software validation teams, and mobile support crews continuously transition between test tracks, autonomous garages, environmental chambers, charging zones, RF test corridors, and telemetry control facilities.
Conventional operational monitoring systems typically capture isolated location events but fail to interpret broader validation context, workforce coordination dependencies, or predictive operational risk conditions. AVehicle AI applies contextual AI reasoning models designed specifically for autonomous mobility engineering operations.
The AI layer continuously evaluates telemetry streams originating from workforce movement data, access activity, prototype fleet behavior, validation schedules, edge telemetry infrastructure, and engineering workflow orchestration. Machine learning models identify operational patterns associated with:
- ADAS regression testing bottlenecks
- Unsafe personnel proximity near active autonomous lanes
- Abnormal movement within dynamic exclusion zones
- Delayed calibration readiness procedures
- Validation workflow congestion
- Fleet staging inefficiencies
- Repeated route execution anomalies
- Prototype idle-time escalation
- Engineering staffing imbalances
- Sensor validation sequencing conflicts

Behavioral AI Models & Predictive Analytics Forecasting
Behavioral AI models interpret movement relationships between engineering teams, autonomous prototype vehicles, telemetry equipment, and operational zones rather than simply evaluating isolated events. This allows the platform to support operational decision-making across continuously evolving proving-ground activities.
Predictive analytics models evaluate historical telemetry patterns to forecast:
- Engineering staffing shortages during major validation windows
- Charging infrastructure saturation
- Fleet readiness conflicts
- Calibration equipment utilization spikes
- High-risk operational overlap conditions
- Vehicle dispatch delays
- Resource allocation inefficiencies

Safety Governance & Multi-Environment Deployments
AI-assisted operational reasoning also supports autonomous mobility safety governance. Edge inference models continuously evaluate unsafe movement conditions involving personnel proximity to active AV test routes, energized high-voltage charging systems, automated convoy operations, or restricted robotics calibration zones.
Operational intelligence workflows support multiple autonomous driving environments including:
- Closed-course AV proving grounds & Urban autonomy simulation corridors
- Robotaxi fleet validation facilities & Autonomous shuttle deployment environments
- Drive-by-wire engineering labs & Sensor fusion development centers
- HD mapping operations & Autonomous trucking validation programs
- V2X testing environments & Mobility R&D campuses

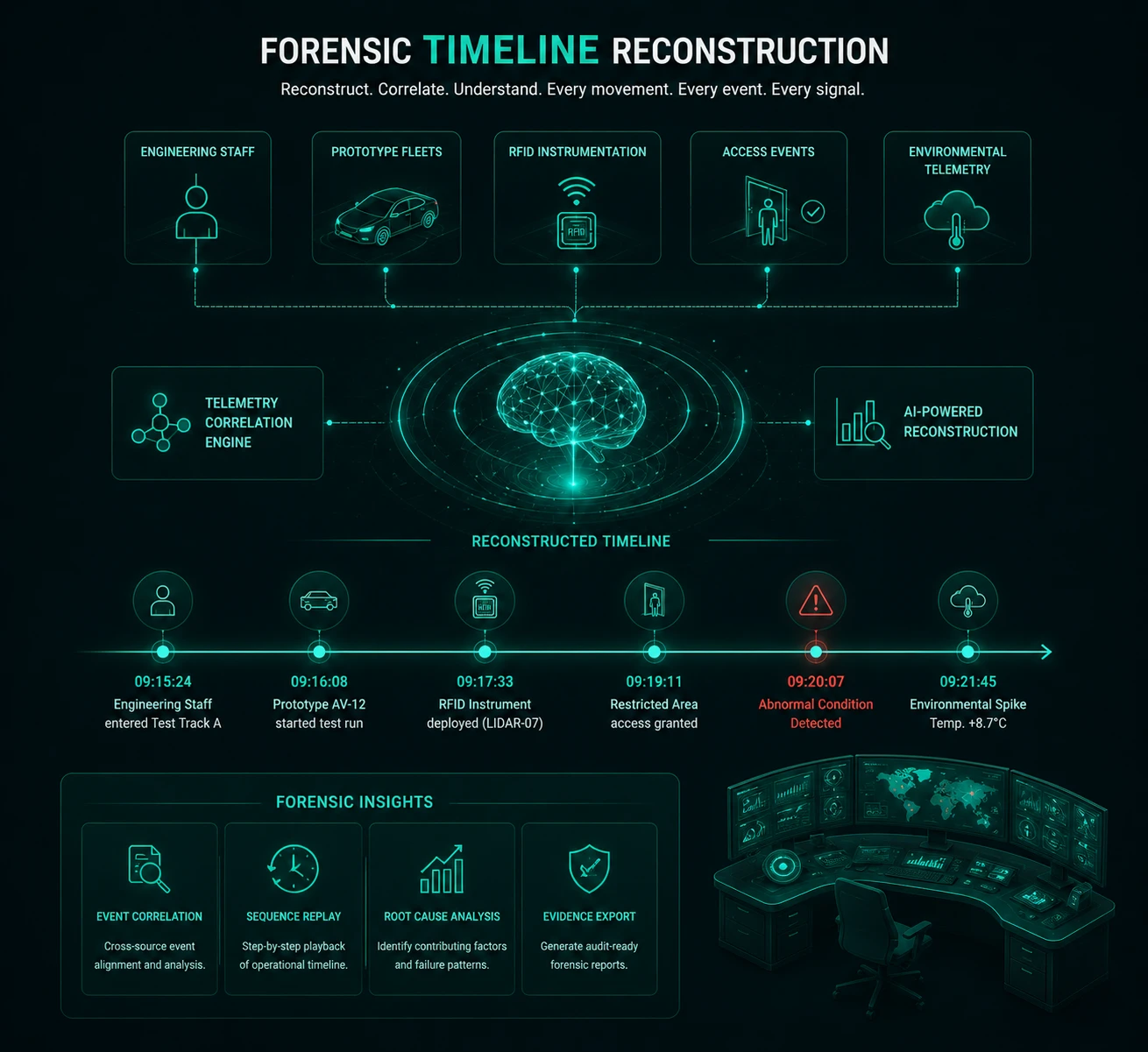
Forensic Timeline Reconstruction & Infrastructure Core
The AI architecture also supports forensic operational reconstruction. During validation failures or safety investigations, telemetry correlation models can reconstruct movement timelines involving engineering staff, prototype fleets, RFID-tagged instrumentation, access events, and environmental telemetry preceding abnormal conditions.
The platform reflects deployment experience accumulated through thousands of industrial IoT projects involving distributed telemetry coordination, mobility infrastructure monitoring, industrial AI deployment, and operational visibility architectures supporting large enterprise engineering ecosystems.
RFID, BLE, GPS, UWB, LoRaWAN, and Cellular Telemetry for AV Operations
Autonomous vehicle engineering facilities operate under highly dynamic physical conditions involving mobile prototype fleets, continuously moving instrumentation assets, RF-sensitive validation zones, outdoor proving grounds, indoor calibration laboratories, and geographically distributed telemetry infrastructure. AVehicle AI incorporates operationally relevant IoT technologies specifically aligned with autonomous mobility engineering workflows rather than generic industrial telemetry deployments.
RFID for Engineering Asset Coordination
RFID technology supports rapid reconciliation and visibility of mobile engineering assets commonly used during AV testing operations, including:
- LiDAR calibration assemblies
- Radar validation equipment
- Embedded GPU compute systems
- Autonomous driving ECUs
- Mobile diagnostics stations
- Thermal imaging devices
- Sensor cleaning equipment
- Battery validation tools
- Precision GNSS instrumentation
- Drive-by-wire testing hardware
RFID workflows reduce manual inventory reconciliation effort during compressed testing schedules, prototype teardown operations, fleet staging activities, and multi-vehicle validation campaigns.

BLE for Indoor Engineering Positioning
BLE telemetry supports indoor operational visibility across autonomous garages, telemetry labs, charging facilities, environmental chambers, and calibration centers where GPS signal reliability may fluctuate due to structural interference.
BLE-enabled operational intelligence assists with:
- Engineering workforce positioning
- Tool movement visibility
- Indoor fleet staging coordination
- Garage occupancy awareness
- Calibration zone monitoring
- Mobile instrumentation tracking
BLE deployment models remain operationally valuable within dense AV engineering environments where rapid infrastructure deployment and flexible positioning intelligence are required.

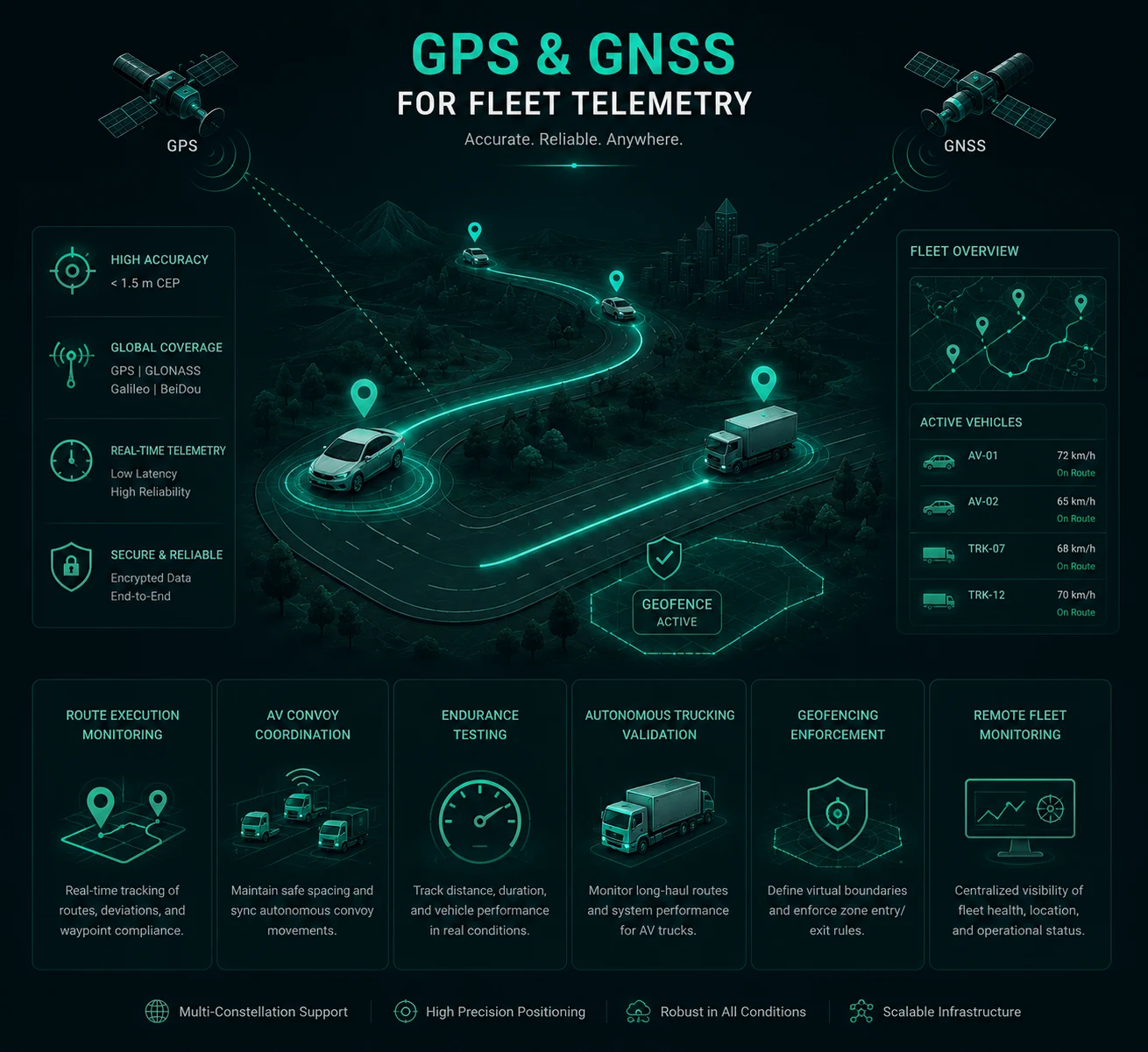
GPS and GNSS for Fleet Telemetry
GPS and GNSS telemetry infrastructure support outdoor autonomous vehicle validation workflows involving:
- Route execution monitoring
- AV convoy coordination
- Endurance testing
- Autonomous trucking validation
- Geofencing enforcement
- Remote fleet monitoring
- HD mapping operations
- Public roadway autonomy testing
High-precision GNSS correction telemetry supports lane-level positioning intelligence critical for ADAS validation, autonomous navigation testing, perception stack benchmarking, and sensor fusion verification.
UWB for Precision Positioning
Ultra-Wideband positioning technologies support high-accuracy location awareness within RF-constrained engineering environments where centimeter-level precision is operationally necessary. UWB telemetry can assist with prototype positioning, automated docking coordination, and precision calibration workflows involving autonomous mobility hardware.
LoRaWAN for Distributed Proving Grounds
Large proving grounds often span expansive outdoor environments with variable infrastructure density. LoRaWAN telemetry provides operational advantages for lower-bandwidth environmental sensing, perimeter monitoring, distributed telemetry aggregation, and long-range infrastructure coordination across large AV validation campuses.
Cellular Telemetry for Mobile Operations
4G LTE and private 5G connectivity support high-mobility telemetry requirements across autonomous fleet operations, roadway validation programs, and distributed engineering activities requiring continuous connectivity between moving prototype fleets and edge infrastructure.
Operational telemetry environments may include:
- V2X communication infrastructure
- Edge roadside telemetry units
- Mobile fleet gateways
- Autonomous shuttle telemetry
- OTA software validation pipelines
- Roadside diagnostics systems
IoT deployment architecture within AVehicle AI focuses strictly on operational execution realities associated with autonomous mobility engineering rather than broad generalized industrial connectivity models.
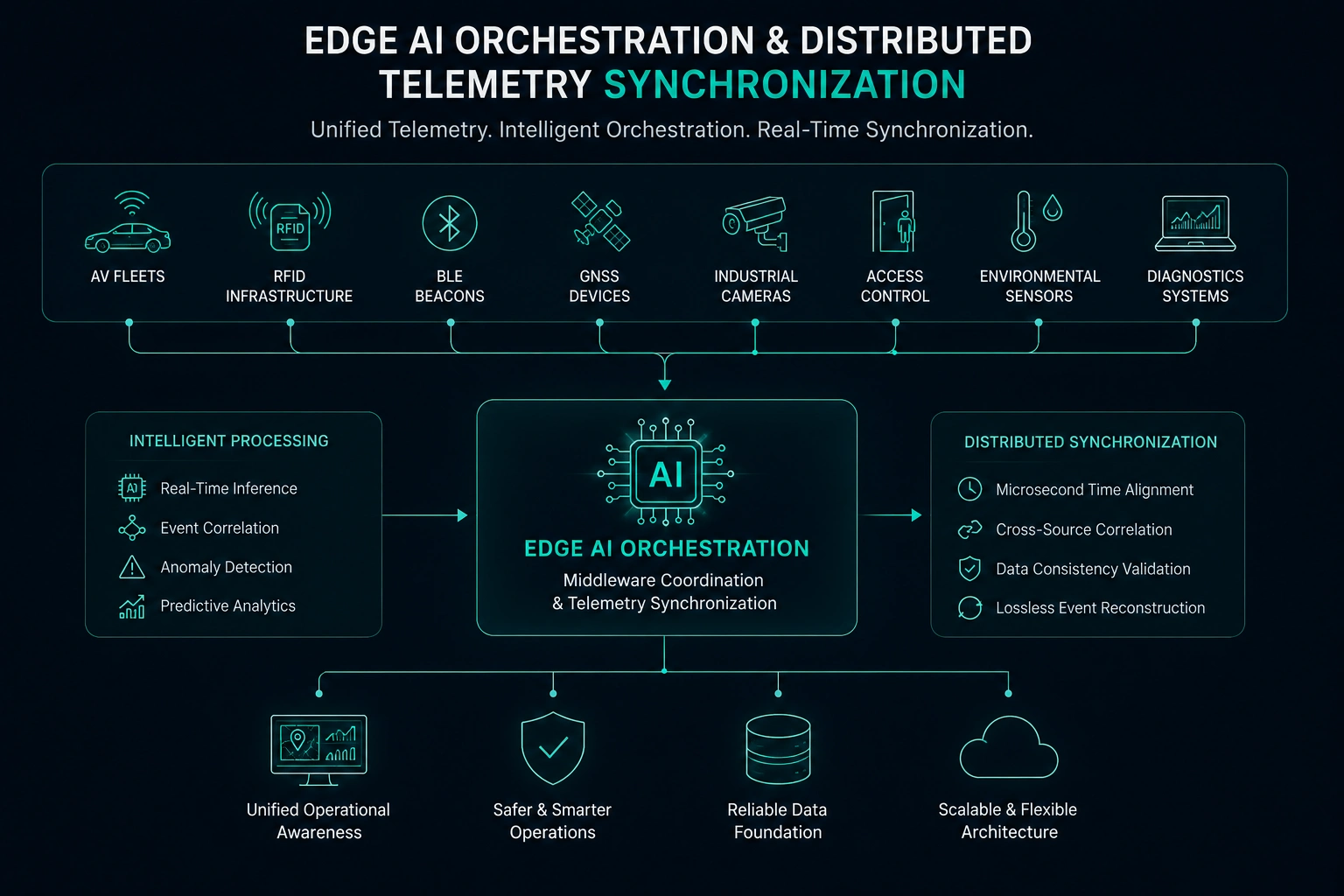
Edge AI Orchestration, Middleware Coordination, and Distributed Telemetry Synchronization
Autonomous vehicle validation ecosystems generate continuous telemetry streams from AV fleets, edge gateways, RFID infrastructure, BLE beacons, roadside telemetry systems, GNSS devices, industrial cameras, access control hardware, environmental sensors, diagnostics systems, and engineering orchestration platforms.
AVehicle AI provides middleware-centric edge infrastructure designed specifically for autonomous mobility operations requiring low-latency telemetry coordination, distributed inference processing, heterogeneous protocol interoperability, and resilient edge-to-cloud synchronization.
The edge coordination architecture supports: Telemetry ingestion pipelines, Distributed event streaming, Edge AI deployment orchestration, Real-time anomaly processing, Fleet telemetry normalization, Device lifecycle management, API-driven enterprise interoperability, Geospatial event processing, Dynamic geofence orchestration, and Operational event correlation.
Operational middleware continuously synchronizes telemetry across proving-ground infrastructure, AV garages, edge roadside infrastructure, telemetry labs, simulation environments, and centralized enterprise platforms. Edge processing nodes support localized operational reasoning during: Autonomous convoy operations, High-speed proving-ground exercises, Dynamic exclusion zone enforcement, Real-time safety escalation, Vehicle route deviation detection, Workforce proximity monitoring, and Edge-side telemetry buffering.
The architecture supports heterogeneous communication environments involving MQTT, REST APIs, industrial telemetry protocols, GPS streams, BLE telemetry, RFID event pipelines, and cellular telemetry aggregation.
Cloud Version
The cloud-hosted deployment model supports distributed autonomous mobility organizations operating across multiple proving grounds, engineering campuses, regional testing facilities, and collaborative AV development environments. Cloud deployment capabilities include:
- Centralized telemetry visibility
- Multi-site fleet coordination
- AI model synchronization
- Cross-facility operational analytics
- Distributed engineering collaboration
- Remote telemetry diagnostics
- Scalable AI inference coordination
- Enterprise operational reporting
Server Version
Certain AV engineering organizations maintain private telemetry governance requirements for confidential autonomous driving programs, proprietary perception models, and restricted validation workflows. Server-based deployment supports:
- Customer-managed infrastructure
- Internal telemetry governance
- Air-gapped deployment environments
- Secure R&D isolation
- Restricted fleet telemetry retention
- Private edge orchestration
- Controlled enterprise integrations
AVehicle AI’s infrastructure methodologies are informed by decades of industrial IoT deployment experience involving distributed telemetry coordination, industrial edge infrastructure, enterprise mobility systems, and mission-critical operational visibility environments.
Real-World Operational Workflows for AV Validation and ADAS Programs
Autonomous mobility engineering programs require operational synchronization between prototype fleets, sensor instrumentation, workforce coordination, validation scheduling, charging infrastructure, and distributed telemetry environments. AVehicle AI supports execution-oriented AIoT workflows across real-world autonomous vehicle operations.
Autonomous Proving-Ground Coordination
Large proving grounds frequently manage concurrent validation activities involving:
- Autonomous navigation testing
- Collision avoidance validation
- Sensor fusion benchmarking
- Adaptive cruise control validation
- Highway pilot testing
- Robotaxi route evaluation
- Autonomous trucking exercises
- Environmental endurance testing
AI-assisted operational visibility continuously evaluates fleet telemetry, workforce positioning, calibration readiness, and access governance conditions across dynamic proving-ground sectors.
Operational outcomes commonly include:
- Reduced testing interruptions
- Faster route turnover
- Improved fleet utilization
- Lower manual coordination effort
- Reduced validation delays
- Improved operational safety governance
LiDAR and Sensor Calibration Operations
Sensor calibration workflows involve constant movement of specialized instrumentation between calibration labs, environmental chambers, autonomous garages, and proving-ground sectors.
RFID and BLE telemetry assist engineering teams with rapid instrumentation verification, calibration sequencing, and equipment location visibility during compressed testing schedules.
AI reasoning identifies:
- Calibration queue bottlenecks
- Delayed sensor preparation
- Instrumentation shortages
- Workflow synchronization conflicts
- Repeated calibration failures
- Equipment utilization inefficiencies
Autonomous Garage and Fleet Staging
Prototype garages frequently support simultaneous OTA updates, battery rotation, diagnostics execution, fleet staging, sensor cleaning, and software validation workflows.
AI-assisted access governance continuously evaluates personnel movement near restricted AV bays, energized charging systems, and secure diagnostics zones.
Operational intelligence assists with:
- Prototype dispatch sequencing
- Charging coordination
- Maintenance workflow optimization
- Mobile tooling visibility
- Fleet readiness tracking
- Garage occupancy management
Urban AV Simulation Corridors
Urban validation environments involve dynamic roadway conditions requiring telemetry coordination between prototype fleets, roadside edge infrastructure, engineering teams, and safety operators.
GPS, cellular telemetry, edge AI processing, and geospatial orchestration assist with:
- Route deviation detection
- Dynamic geofence management
- Fleet telemetry synchronization
- Operational escalation handling
- Public roadway coordination
- AV route performance analysis
Engineering Inventory and Mobile Instrumentation
Engineering operations depend heavily on rapid movement of embedded compute hardware, telemetry systems, LiDAR assemblies, GNSS equipment, and mobile diagnostics infrastructure.
RFID-based inventory intelligence supports:
- Fleet staging verification
- Instrumentation reconciliation
- Maintenance preparation
- Validation equipment allocation
- Prototype reconfiguration workflows
- Engineering asset accountability
AI models continuously evaluate movement behavior and operational dependencies to forecast equipment shortages, allocation conflicts, and upcoming staging pressures affecting validation schedules.